






Trawl sensors (Pingers)
Pinger is the term used for the sensors that are attached to the trawl and/or trawl bag and transmit simple information to the vessel. The method used for transmission and reception of signals is very simple and very reliable. Scanmar has delivered more than 30.000 Pingers through the years.
The new SS4 Pingers differ from earlier generations in “all” areas:
- New sensor construction and newly developed plastic material
- 10 times larger battery capacity
- Programmable sending effect – multiplies the working time
- Fully charged in 2.5 hours
- Multifunctional – the sensors have several functions built in
- The functions can be used simultaneously or alternately
- The sensors can be placed in different places as needed
- Simple to switch frequency when interference occurs
- Light diode shows when the sen sor is transmitting
- Simple self test
THE SENSORS INCLUDED IN THE SS4 PINGER SERIES ARE:
- SuperCatch – Catch sensor
- SuperCatch – Filling sensor
- Twist sensor
- Depth sensor
- Temperature sensor
- Rip sensor
The sensors can be delivered with one function and be updated later, or have several functions at delivery.

SuperCatch : Catch sensor, filling indicator – or both
Scanmar SuperCatch meets all the requirements any fisherman could desire:
- Correct and precise information
- New robust and reliable design eliminating th e need for service and repair
- Labor saving
- Negligible operating costs and long lifetime providing very profitable investmen t
- Extremely long operation time
USES:
- Catch Sensor
- Activation of the sensor with the stretch wire in the traditional way
- Fast activation of stretch wire, important in large fish intake
- Filling Indicator
- Indicates filling amount using both pitch and roll angle measurements on the bag
- Pitch measurements show how the bag gradually fills up to the point where the sensor is mounted
- Shows exactly where the fish intake is so that the vessel can be turned to fish again in the area where the fish were detected
- Roll angle (twist) shows how the bag twists when it begins to fill and how it gradually rights itself when it is filled
- The sensor can be programmed for normal or quick updating
- Up /down notifications so that the trawl is not towed with the cod end upside down
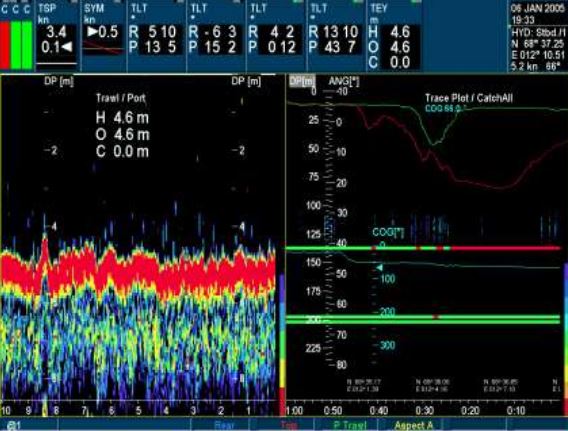
The log screen displays the activation of the Catch sensors (green/red line) and output of the Catch/Angle combination sensor when fish pass by the sensor on the way back to the cod end.
Sensor information:
- Construction
- New design with double casting of the electronics provides 100% protection
- Scanmar’s newly developed Super Plastic eliminates damage to the sensor due to blows, tension, or dragging along the bottom with a twisted trawl
- Batteries, operation time
- The new batteries have 10 times as much capacity as the old batteries
- Transmission strength in sensors can be adjusted depending on the depth of the fish, something that in most cases will lead to a further increase in operation time
- The sensor is always ready for use because a quick charge for a haul can be done in minutes
- The improved battery capacity and increased time between charges means the battery can be used for many years be fore it must be replaced
- Charging and programming
- Newly developed technology in the charger, the sensor, and the battery cartridge makes charging time a fraction of what is normal for this type of battery
- Transmission power and frequency are easi ly programmed with the new charger
- Choosing fast or normal refresh rate is also done easily via the charger
- The charger has features that can check both battery and sensor condition.

Mounting of Catch sensor
Twist sensor: good water flow is essential to get ting the catch back to the cod end
As long as we have operated fishermen have asked us what the reason might be for why often the fish they see enter the trawl opening do not end up in the cod end. There can be several reasons. One can be that the towing speed i s too low so that the fish stay in the opening and escapes in front of the trawl. But the suspicion has always been that it is usually because of other reasons.
As more and more fishermen s tarted to use a Scanmar Trawl Eye in combination with the Trawl Speed sensor - both i n the opening and in the belly we could eliminate some of the problems caused by too low towing speed.
Stickers in medium large mesh gave us a hint what happens further ahead where the mesh is so big that the fish easily escapes through it?
We had our suspicions: Bucket effect and Twist!
Scanmar’s Trawl Speed , Symmetry and Grid sensors have had angle meters implem ented since 1985, and especially Symmetry sensors in the trawl opening and Trawl Speed sensor in the belly gave clear indications that the water flow and fish entrance affected the trawl’s shape in different ways. We were also familiar with thorough tests made in 1985 by the Germ an Institute of Marine Research which proved the presence of Bucket effect in a pelagic trawl.
We therefore decided to make some simple prototypes of angle meters for testing on trawl doors, trawl, bag, bottom gear , etc. and we re gistered among other things that the trawl’s shape could change a lot with different directions of water currents, towing speed and fish entrance. In development of our new sensor generation SS4 ScanSense , multifunctional sensors, we therefore decided that Angle measurements would be implemented as a standard, not just as an additional function, but specifically in an individual sensor, which, granted, can be upgraded with other functions.
With the experience we have gained through six year with the use o f the Twist sensor, we can determine that Bucket effects arise often with the result of water pressing through the open mesh and fish escaping.
MEASUREMENTS AND OPTIONS | BATTERY | ||
| Catch | Smart battery | Li-Ion 10,8V / 7 200 mAh | |
| Range | Full / Empty | Charging time | Typically 1,5 hour (QBC-X1/X4) |
| Mode | Standard / SuperCatch | Battery capacity indicator | 5 LED |
| Angle | Configuration* | ||
| Roll angle | -90° til +90° | Channel selection [FID]. Type of measurement, Power selection, Catch type and Upside down. | |
| Pitch angle | -90° til +90° | Weight | |
| ScanFactor | 0 til +20° | In air | 6,1 kg |
| ScanFactor Pitch | 0 til +20° | In water | 2,5 kg |
| Accuracy | +/- 1° | UPLINK | |
| Temperature | Frequency range | 38,9 – 43,4 kHz | |
| Range | -5 til +30 °C | Source level high power | 189 dB //1uPa @ 1m |
| accuracy | +/- 0,15 °C | Source level medium power | 186 dB //1uPa @ 1m |
| Upside/down | OK / Upside down | Source level low power | 183 dB //1uPa @ 1m |
| Rip | Net OK / Net ripped | Beam width | 55 deg (- 3dB) |
OPERATION | Transducer tilt | 20° upward | |
| Mounting positions | Net | Range to vessel* | Appx. 2 500 m (high power mode) |
| Update rate | 2,5 til 30 sec | DIMENSIONS | |
| Operation time * | 300-1500 hours | Length | 269 mm |
| Maximum depth* | 1500 m continuously (2300 m for a short period) | Width | 209 mm |
| Height | 103 mm |